
Передача сигналов
Физически проводник CAN-шины современного автомобиля выполнен из двух составляющих. Первый — черного цвета и называется CAN-High. Второй проводник, оранжево-коричневый, именуется CAN-Low. Благодаря представленной структуре коммуникаций из схемы автомобиля удалена масса проводников. При производстве транспортных средств это позволяет уменьшить вес изделия до 50 кг.

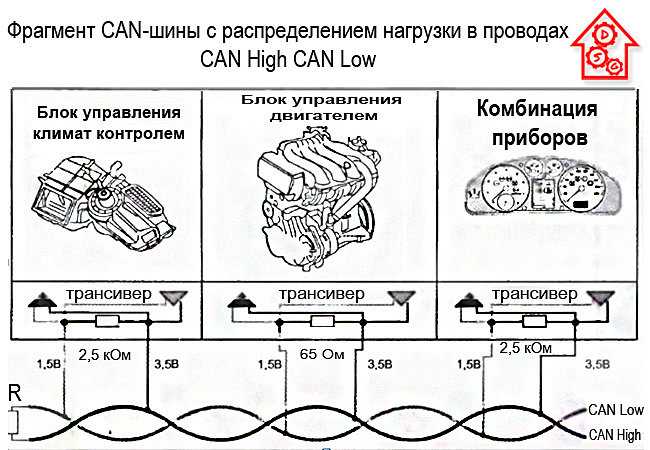
Общая сетевая нагрузка состоит из разрозненных сопротивлений блоков, которые входят в состав протокола, называемого КАН-шина.
Различны и скорости передачи-получения каждой системы. Поэтому обеспечивается обработка разнотипных сообщений. Согласно описанию шины-CAN, эту функцию выполняет преобразователь сигналов. Он называется межсетевым электронным интерфейсом.
Расположен этот прибор в конструкции управляющего блока, но бывает выполнен в виде обособленного прибора.
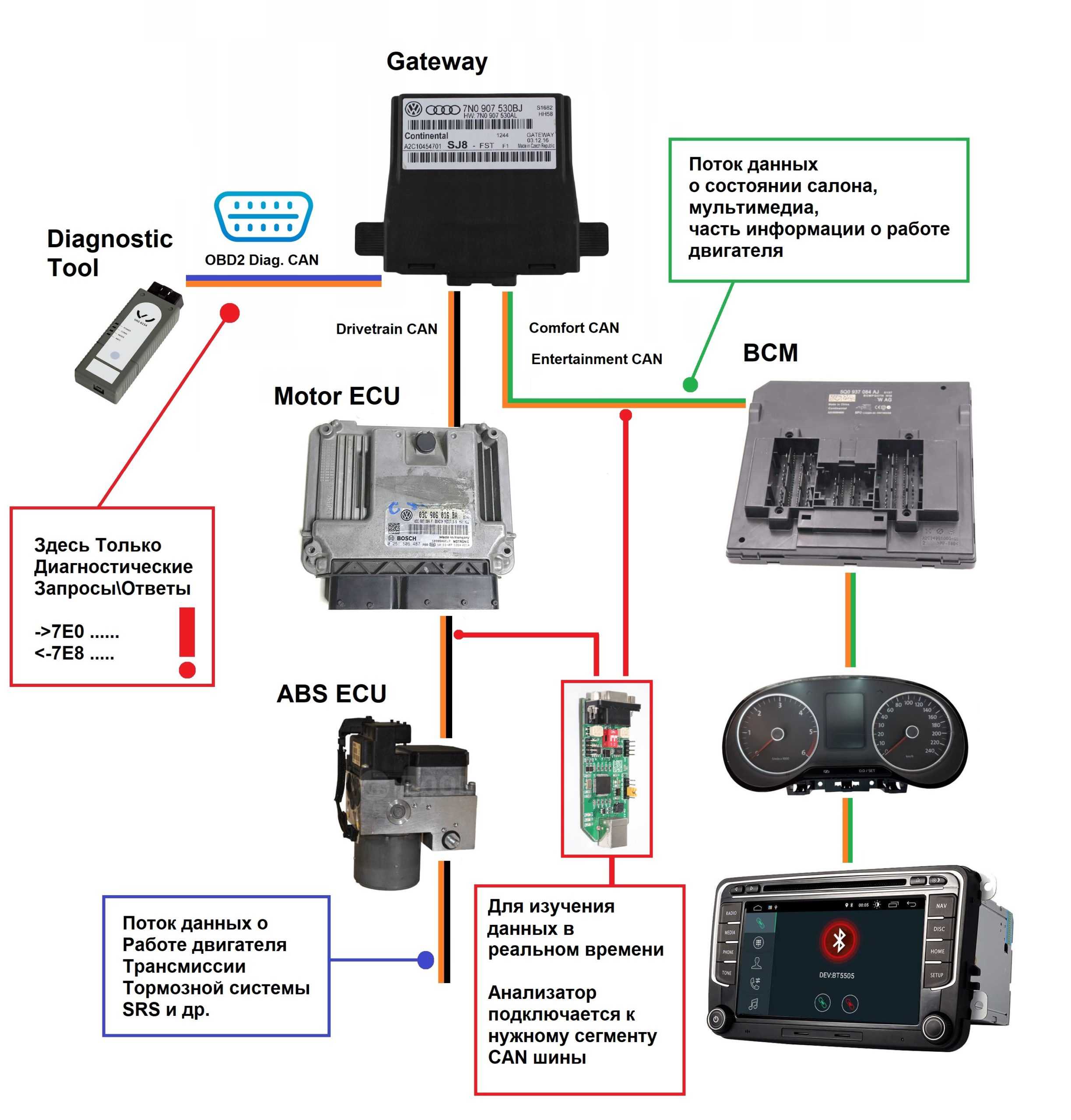
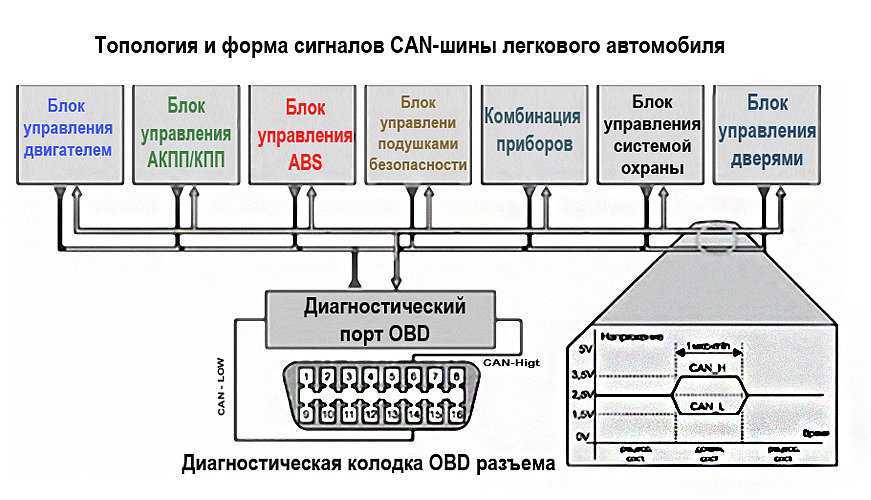
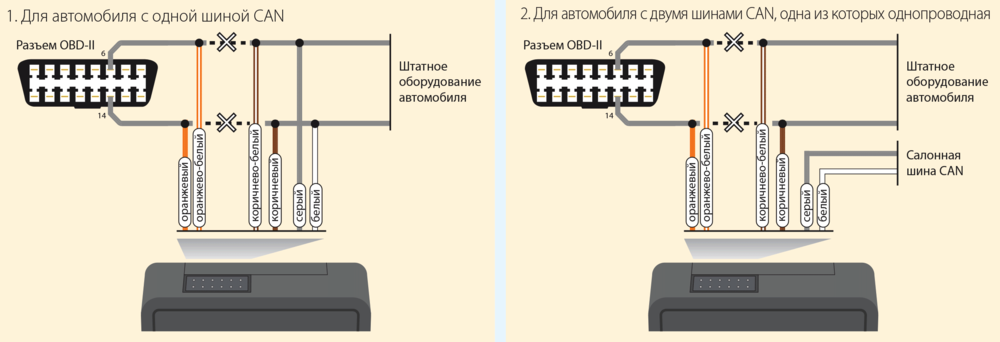
Представленный интерфейс применяют также для вывода и ввода сигналов диагностического характера. Для этого предусмотрено наличие унифицированной колодки OBD. Это особый разъем для диагностики системы.
Классификация шинных систем автомобиля
Шина CAN была признана стандартом с момента своего появления в серийно выпускаемых автомобилях в 1991 году. Но она также часто используется и в автоматизации. Основные особенности:
- Передача сообщений с ранжированием приоритетов и неразрушающим арбитражем;
- Снижение затрат благодаря использованию недорогой витой пары и простого протокола с невысокими требованиями к вычислительной мощности;
- Скорость передачи данных до 1 Тбит/с у высокоскоростной шины CAN и до 125 Кбит/с у низкоскоростной шины CAN (более низкие расходы на аппаратную часть);
- Высокая надежность передачи данных за счет распознавания и сигнализации спорадических и постоянных неисправностей и благодаря унифицированию сетевых процессов через acknowledge;
- Принцип много абонентской шины;
- Высокая степень готовности за счет обнаружения неисправных станций;
- Стандартизация по ISO 11898.
Система передачи данных по шине CAN
Логические состояния шин и шифрование
Для обмена данными шина CAN использует два состояния «доминантное» и «рецессивное», с помощью которых передаются информационные биты. Доминантное состояние соответствует «0», а рецессивное — «1». Для шифрования передачи используется процесс NRZ (без возврата на ноль), в котором нулевое состояние не всегда возвращается в промежуток между двумя одинаковыми состояниями передачи и, соответственно, необходимый для синхронизации временной интервал между двумя фронтами может оказаться слишком большим.
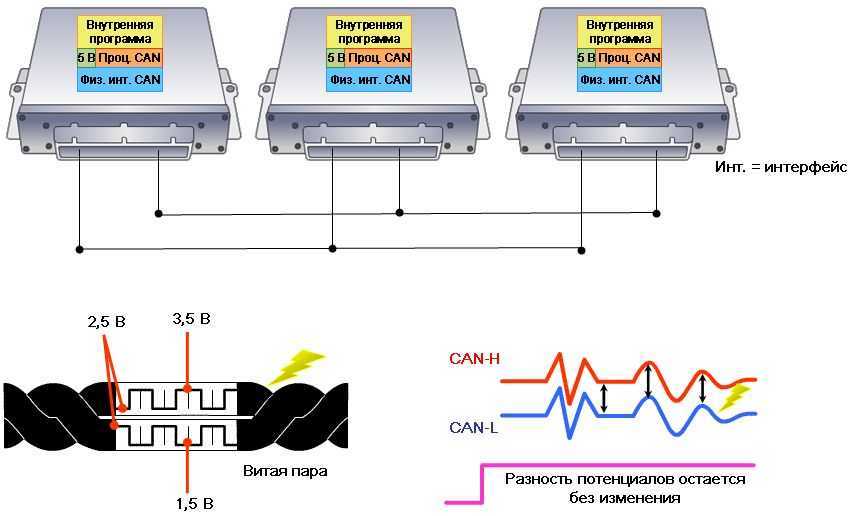
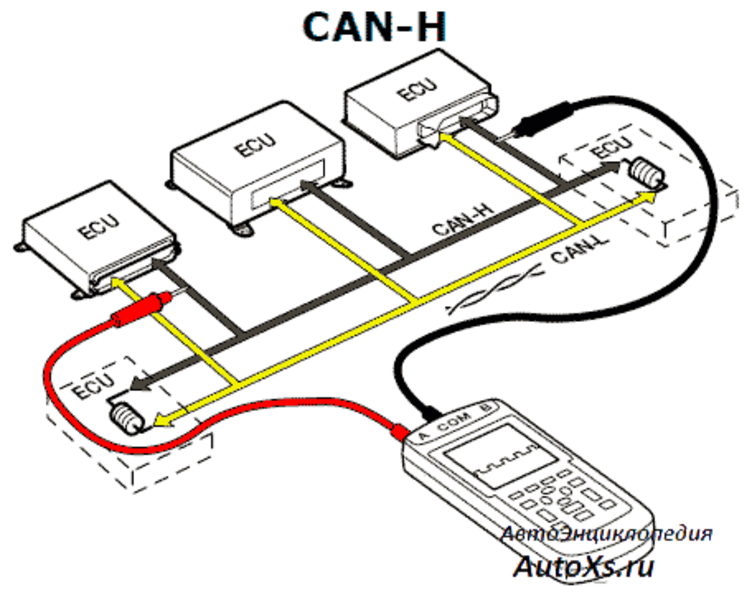
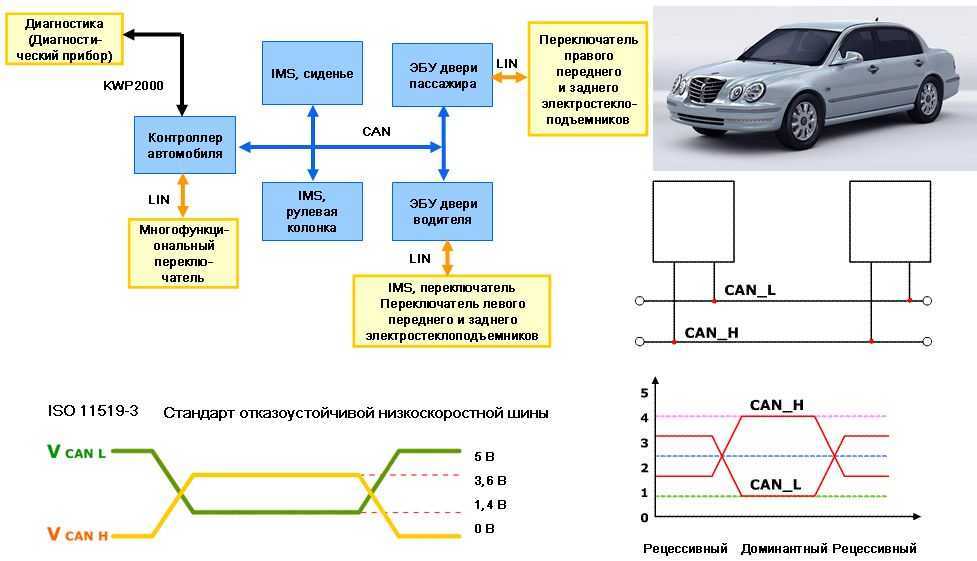
В основном используется двухпроводной кабель, в зависимости от окружающих условий, с витой или не витой парой. Две шинные линии называются CAN-H и CAN-L (рис. «Уровень напряжения передачи по CAN» ).
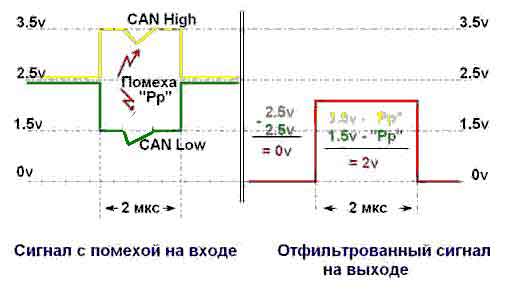
Двухпроводный кабель обеспечивает симметричную передачу данных, при которой биты передаются через обе шинные линии с использованием разных напряжений. Это уменьшает чувствительность к синфазным помехам, поскольку помехи влияют на обе линии и могут быть отфильтрованы путем создания разности (рис. «Фильтрация помех по шине CAN» ).
Однопроводный кабель представляет собой способ сокращения производственных затрат за счет экономии на втором кабеле. Однако общее подключение к массе, выполняющей функцию второго кабеля, должно быть доступно для этой цели всем пользователям шины. Поэтому однопроводный вариант шины CAN возможен только для системы связи с ограниченным монтажным пространством. Передача данных по однопроводному кабелю более чувствительна к излучаемым помехам — он не позволяет фильтровать импульсы помех так, как в двухпроводном кабеле. В результате на шинной линии требуется сигнал более высокого уровня. Это, в свою очередь, отрицательно сказывается на излучении помех. Поэтому необходимо снизить крутизну фронта импульсов сигналов шины по сравнению с двухпроводным кабелем. Это связано с уменьшением скорости передачи данных. По этой причине однопроводной кабель используется только для низкоскоростной шины CAN в области кузова и электроники для функций комфорта. Например, низкоскоростная шина CAN с двухпроводным кабелем в случае обрыва кабеля должна продолжать работать как однопроводная система. Однопроводное решение не описывается в спецификации CAN.
Уровни напряжения шины CAN
Высокоскоростные и низкоскоростные шины CAN используют разные уровни напряжения для передачи доминантных и рецессивных состояний. Уровни напряжения низкоскоростной шины CAN показаны на рис. а, «Уровень напряжения передачи по CAN», а высокоскоростной — на рис. Ь, «Уровень напряжения передачи по CAN».
Высокоскоростная шина CAN в рецессивном состоянии на обеих линиях использует номинальное напряжение 2,5 В. В доминантном состоянии на CAN-H и CAN-L подается номинальное напряжение 3,5 В и 1,5 В, соответственно. В низкоскоростной шине CAN в рецессивном состоянии на CAN-H подается напряжение 0 В (максимум 0,3 В), на CAN-L — 5 В (минимум 4,7 В). В доминантном состоянии на CAN-H напряжение составляет не менее 3,6 В, а на CAN-L не более 1,4 В.
Пример HTML-страницы
Предельные значения
Для арбитражного метода в случае CAN важно, чтобы все узлы в сети видели биты идентификатора фрейма одновременно, чтобы узел, передавая бит, видел, передают ли их другие узлы. Задержки возникают из-за распространения сигнала в шине данных и обработки в трансивере
Таким образом, максимально допустимая скорость передачи данных зависит от общей длины шины. Стандарт ISO предусматривает скорость 1 Мбит/с для 40 м. У более длинных проводов возможная скорость передачи данных примерно обратно пропорциональна длине провода. Сети с дальностью 1 км могут работать со скоростью 40 кбит/с.
Что рекомендуется выполнить сначала
Откройте в браузере любой поисковик и задайте следующее слово: «can_osob». Во второй или третьей строке будет найден сайт «ultrastar». Скачайте документ «pdf» и сохраните его на компьютере. В документе рассматривается, как проводить начальное программирование, то есть, как задавать «номер» автомобиля в зависимости от модели и бренда.
Интересно то, что для разных моделей управляющая последовательность отличается. То есть, без файла «can_osob.pdf» сделать что-либо не получится.
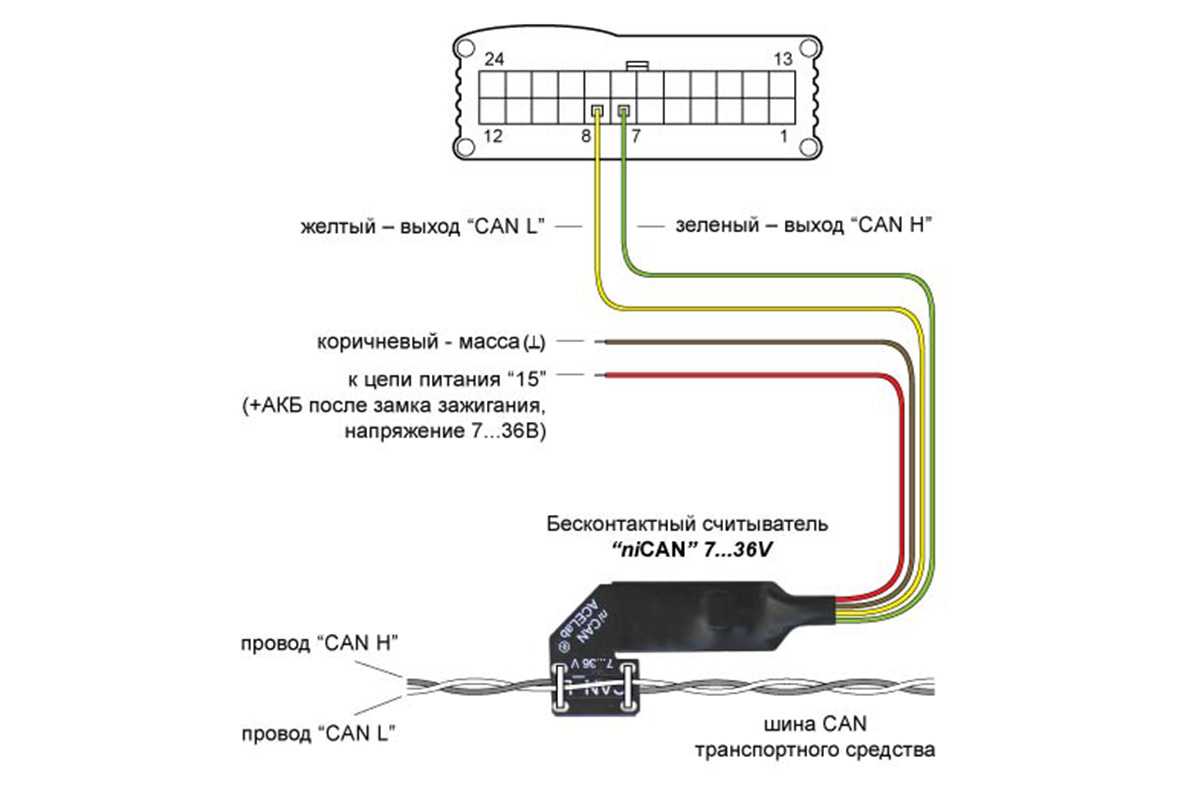
Допустим, модуль подключен к шине CAN и к «массе». Еще нужен провод, на котором напряжение «+12» присутствует всегда. А подключать его в процессе настройки надо будет к кабелю питания модуля. Распайка разъема будет следующей:
- Черный (1) – масса;
- Коричневый (2) – CAN-L;
- Красный (10) – питание;
- Коричнево-красный (11) – CAN-H.
Процесс установки «номера авто» рассмотрен в документе can_osob. Допустим, все было выполнено правильно, но модуль в завершении выдает серии звуковых сигналов. Значит, был распознан только номер группы, а номер подгруппы придется задавать вручную.
Что такое CAN FD (Flexible Data Rate CAN)?
С расширением функциональности автомобиля возрастает и нагрузка на CAN-шину. CAN FD (Flexible Data Rate) была разработана как шина CAN «следующего поколения».

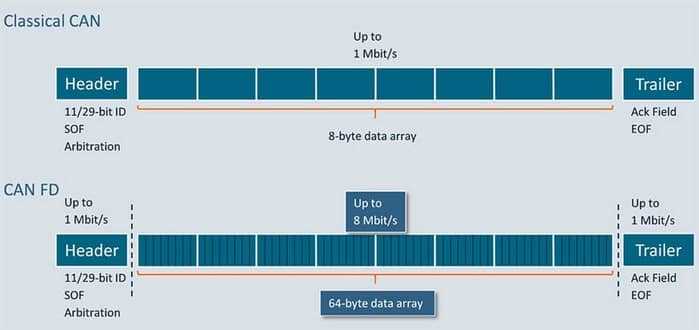
Стандартная длина каждого сообщения была увеличена в 8 раз — с 8 до 64 байт, а максимальная скорость передачи данных была аналогично увеличена с 1 Мбит/с до 8 Мбит/с. Одним словом, CAN FD повышает скорость и эффективность. Поэтому она используется в современных автомобилях.


CAN FD обратно совместим и поддерживает протокол CAN 2.0, а также специальные протоколы, такие как SAE J1939.
CAN FD по сути является расширением оригинального стандарта CAN, как указано в ISO 11898-1, и полностью совместим с классическими CAN-шинами.
Отличия CAN FD от обычной CAN-шины
- CAN FD работает одновременно на двух скоростях. Поле арбитража или заголовок кадра передается со стандартной скоростью, например 500 кбит/с. А поле данных передается на скорости в несколько раз выше, вплоть до 8 Мбит/с.
- Размер сообщения увеличен до 64 байт. В обычной CAN-шине — максимум 8 байт.
- Контроллер CAN FD способен принимать обычные CAN сообщения, а стандартный CAN узел не может принимать кадры формата CAN FD.
- Для шины CAN FD нужны специальные микросхемы-трансиверы с повышенным быстродействием.
В настоящее время CAN FD используется в высокопроизводительных автомобилях, но по мере развития ЭБУ и снижения стоимости аппаратного обеспечения CAN FD, это лишь вопрос времени, когда CAN FD появится практически во всех автомобилях.
Что такое CAN шина и принцип работы
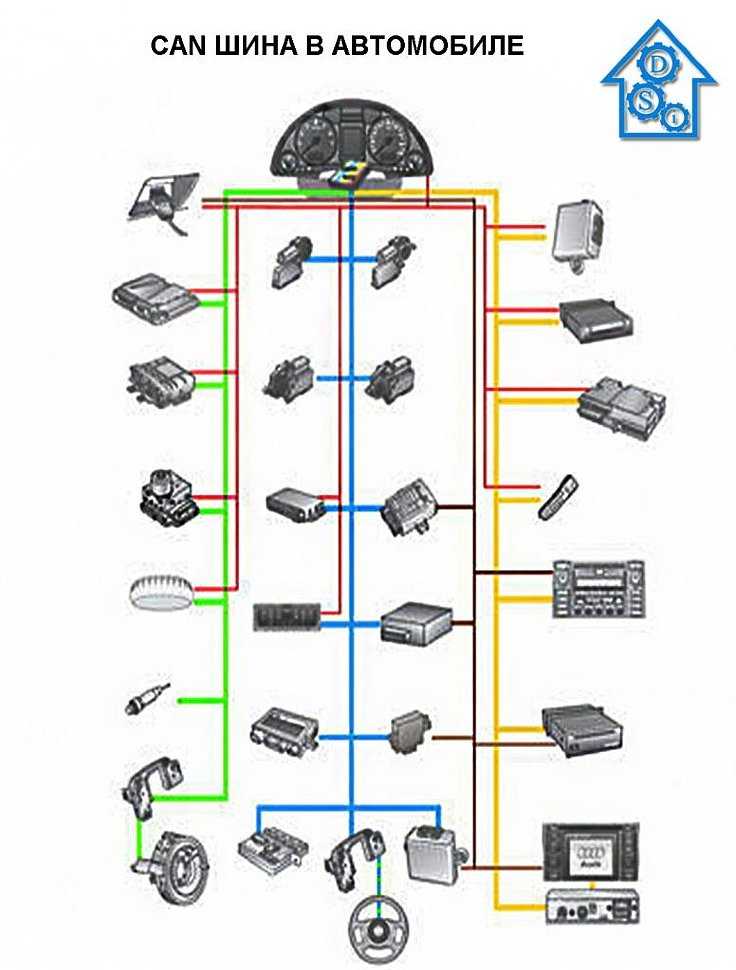
Автомобильный электронный КАН модуль представляет собой сеть контроллеров, предназначенных для объединения всех управляющих блоков машины в одну сеть. Основная особенность заключается в том, что объединение элементов происходит с использованием одного проводника. Сам цифровой интерфейс на авто включает в себя пару кабелей, именуемых CAN. Информация, которая поступает по каналам от одного блока к другому, передается в зашифрованном виде.
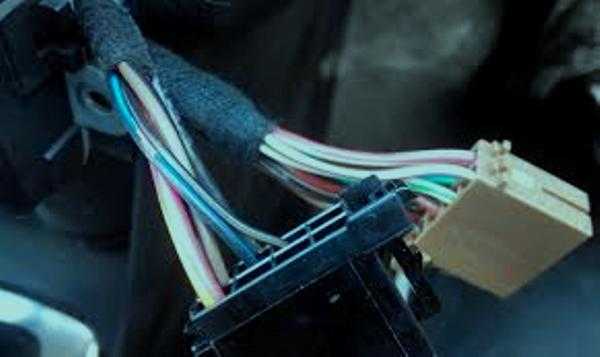
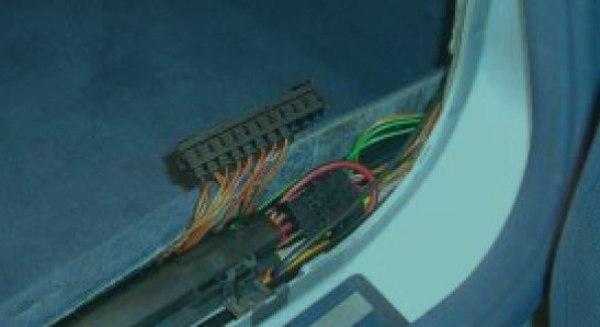
Где находится устройство
Место установки CAN шины зависит от конкретной модели автомобиля, этот момент надо уточнять в сервисном руководстве к машине. Он может располагаться в моторном отсеке или в салоне, под панелью приборов. Подробно на фото показаны примеры расположения КАН интерфейсов.

Функции
Функции, выполняющиеся интерфейсом КАН:
- возможность подключать к электросети транспортного средства и настраивать любые устройства, в том числе автосигнализации;
- более упрощенный алгоритм подключения и работы дополнительного оборудования и систем, установленных в автомобиле;
- возможность одновременной передачи и получения цифровой информации и ее анализа от различных источников;
- снижение величины воздействия внешних помех на работу основных и дополнительных систем;
- более быстрое подключение функции автозапуска противоугонной системы;
- ускорение процесса передачи данных к конкретным устройствам и механизмам машины.
Режимы
Цифровая система может функционировать в нескольких режимах:
- Автономный или фоновый. При его активации все системы выключены, но на КАН интерфейс подается питание. Значение напряжения достаточно низкое, поэтому такой режим работы не позволит разрядить АКБ.
- Режим пуска. Он работает, когда водитель устанавливает ключ в замок и прокручивает его в положение зажигания либо кликает по кнопке Старт/Стоп. Производится включение функции стабилизации питания. Напряжение начинает поступать на датчики и регуляторы.
- Активный режим функционирования. При его включении обмен информации начинает происходить между всеми датчиками и регуляторами. Когда активирован активный режим, значение потребления энергии может возрасти до 85 мА.
- Режим отключения либо засыпания. При остановке мотора все датчики и системы, подключенные к интерфейсу КАН, перестают работать. Производится их отключение от электросети машины.
Характеристики
Отдельно следует сказать об основных характеристиках скорости работы интерфейса:
- общая величина скорости передачи данных с информацией составляет 1 мб/с;
- при отправке информации между микропроцессорными устройствами этот показатель составит 500 кб/с;
- скорость получения данных к автомобильной системе «Комфорт» составляет 100 кб/с.
Что такое CAN-шина
Электронный КАН-интерфейс в авто представляет собой сеть контроллеров, использующихся для объединения всех управляющих модулей в единую систему.
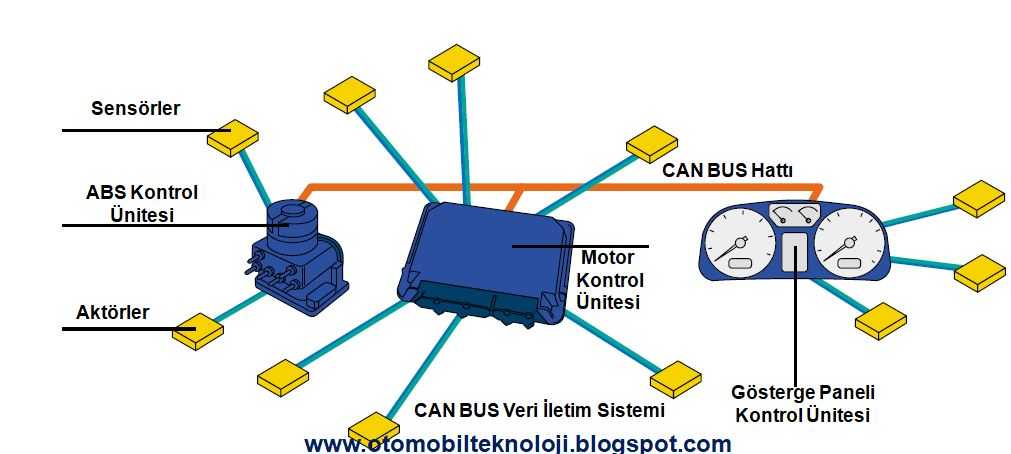
Данный интерфейс представляет собой колодку, с которой можно соединять посредством проводов блоки:
- противоугонного комплекса, оборудованного функцией автозапуска либо без нее;
- системы управления мотором машины;
- антиблокировочного узла;
- системы безопасности, в частности, подушек;
- управления автоматической коробкой передач;
- контрольного щитка и т. д.
Устройство и где находится шина
Конструктивно CAN-шина представляет собой блок, выполненный в пластиковом корпусе, либо разъем для подсоединения кабелей. Цифровой интерфейс состоит из нескольких проводников, которые называются CAN. Для подключения блоков и устройств используется один кабель.
Место монтажа устройства зависит от модели транспортного средства. Обычно этот нюанс указывается в сервисном руководстве. СAN-шина устанавливается в салоне автомобиля, под контрольным щитком, иногда может располагаться в подкапотном пространстве.
Как работает?
Принцип работы автоматической системы заключается в передаче закодированных сообщений. В каждом из них имеется специальный идентификатор, являющийся уникальным. К примеру, «температура силового агрегата составляет 100 градусов» или «скорость движения машины 60 км/ч». При передаче сообщений все электронные модули будут получать соответствующую информацию, которая проверяется идентификаторами. Когда данные, передающиеся между устройствами, имеют отношение к конкретному блоку, то они обрабатываются, если нет — игнорируются.
Длина идентификатора CAN-шины может составить 11 либо 29 бит.
Каждый передатчик информации одновременно выполняет считывание данных, передающихся в интерфейс. Устройство с более низким приоритетом должно отпустить шину, поскольку доминантный уровень с высоким показателем искажает его передачу. Одновременно пакет с повышенным значением остается нетронутым. Передатчик, который потерял связь, спустя определенное время ее восстанавливает.
Интерфейс, подключенный к сигналке или модулю автоматического запуска, может функционировать в разных режимах:
- Фоновый, который называется спящим или автономным. Когда он запущен, все основные системы машины отключены. Но при этом на цифровой интерфейс поступает питание от электросети. Величина напряжения минимальная, что позволяет предотвратить разряд аккумуляторной батареи.
- Режим запуска или пробуждения. Он начинает функционировать, когда водитель вставляет ключ в замок и проворачивает его для активации зажигания. Если машина оборудована кнопкой Старт/Стоп, это происходит при ее нажатии. Выполняется активация опции стабилизации напряжения. Питание подается на контроллеры и датчики.
- Активный. При активации этого режима процедура обмена данными осуществляется между регуляторами и исполнительными устройствами. Параметр напряжения в цепи увеличивается, поскольку интерфейс может потреблять до 85 мА тока.
- Деактивация или засыпание. Когда силовой агрегат останавливается, все системы и узлы, подключенные к шине CAN, перестают функционировать. Выполняется их деактивация от электрической сети транспортного средства.
Характеристики
Технические свойства цифрового интерфейса:
- общее значение скорости передачи информации составляет около 1 Мб/с;
- при отправке данных между блоками управления различными системами этот показатель уменьшается до 500 кб/с;
- скорость передачи информации в интерфейсе типа «Комфорт» — всегда 100 кб/с.
Канал «Электротехника и электроника для программистов» рассказал о принципе отправки пакетных данных, а также о характеристиках цифровых адаптеров.
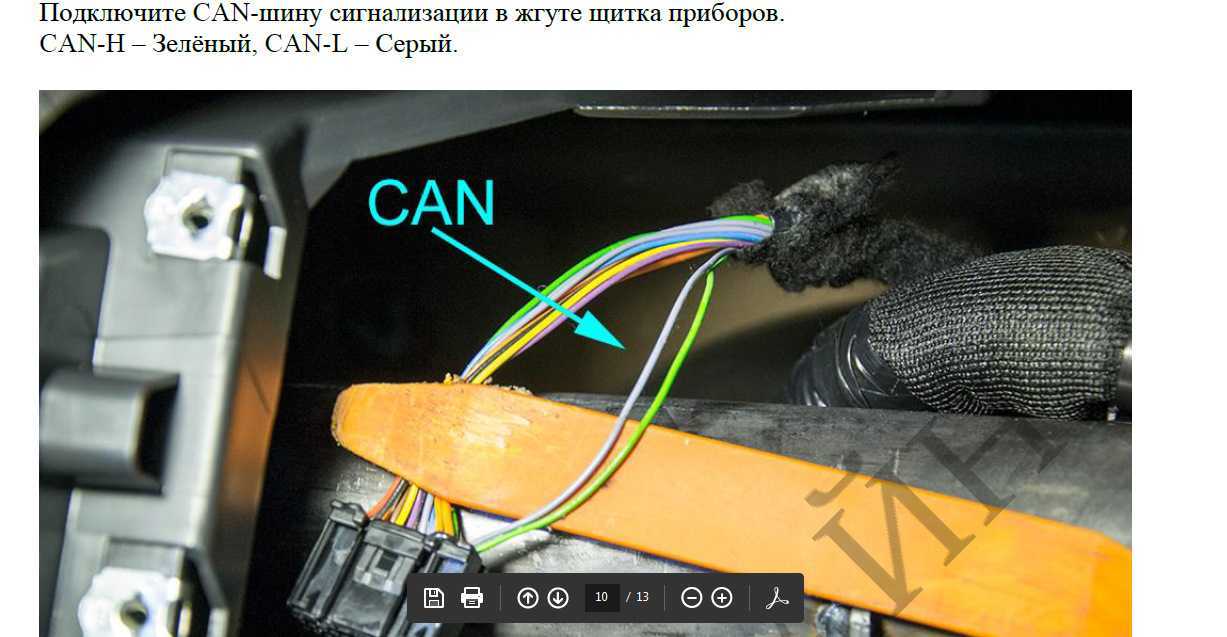
Инструкция по подключению сигнализации по CAN-шине
При монтаже противоугонной системы простой вариант ее соединения с бортовой сетью — связать охранную установку с цифровым интерфейсом. Но такой метод возможен при наличии КАН-шины в автомобиле.
Чтобы произвести установку автосигнализации и подключить ее к CAN-интерфейсу, необходимо знать место монтажа блока управления системой.
Если сигналку ставили специалисты, то надо обратиться за помощью с этим вопросом на СТО. Обычно устройство располагается за приборной панелью автомобиля или под ней. Иногда установщики ставят микропроцессорный модуль в свободное пространство за бардачком или автомагнитолой.
Для выполнения задачи потребуется:
- мультиметр;
- канцелярский нож;
- изолента;
- отвертка.
Пошаговые действия
Процедура подключения противоугонной установки к CAN-шине осуществляется так:
- Сначала надо убедиться, что все элементы охранного комплекса установлены и работают. Речь идет о микропроцессорном блоке, антенном модуле, сервисной кнопке, сирене, а также концевых переключателях. Если сигнализация имеет опцию автозапуска, надо убедиться в правильности монтажа этого устройства. Все элементы противоугонной установки подключаются к микропроцессорному блоку.
- Выполняется поиск основного проводника, идущего к CAN-шине. Он более толстый и его изоляция обычно окрашена в оранжевый цвет.
- Основной блок автосигнализации соединяется с данным контактом. Для выполнения задачи используется разъем цифрового интерфейса.
- Производится монтаж блока управления охранной системы, если он не был установлен. Его следует разместить в сухом и недоступном для посторонних глаз месте. После монтажа устройство надо качественно зафиксировать, иначе в процессе движения на него будут оказывать негативное воздействие вибрации. В результате это приведет к быстрой поломке модуля.
- Место соединения проводников тщательно изолируется, допускается использование термоусадочных трубок. Рекомендуется дополнительно обмотать изолентой провода. Это позволит увеличить их ресурс эксплуатации и не допустить стирания изоляционного слоя. Когда подключение будет выполнено, осуществляется проверка. Если возникли проблемы в передачи пакетных данных, с помощью мультиметра следует произвести диагностику целостности электроцепей.
- На завершающем этапе выполняется настройка всех каналов связи, в том числе дополнительных, если они имеются. Это позволит обеспечить бесперебойную работу охранной системы. Для настройки используется сервисная книжка, входящая в комплектацию противоугонной установки.
Пользователь Sigmax69 рассказал о соединении охранного комплекса с цифровым интерфейсом на примере автомобиля Хендай Солярис 2017.
Can шина автомобиля что это такое
В современных машинах используются электронные блоки управления (ЭБУ, ECU — Electronic Control Unit) для контроля и управления различными системами машины, такими как гидравликой, коробкой передач и двигателем. Аналогично тому, как компьютеры могут быть соединены в одну сеть, блоки управления в машине тоже можно объединить.





Преимущества сетевого соединения:
- Более чувствительная система управления
- Получение более полных и надежных данных
- Обнаружение неисправностей и управление настройками производится средствами программного обеспечения.
Например, ЭБУ двигателя может обмениваться с другими ЭБУ машины по системе сети CAN.
Система CAN: Controller Area Network — сеть контроллеров. CAN разработан компанией Robert Bosch GmbH в середине 1980-х и в настоящее время получил широкое применение в автомобильной, авиационной, тракторостроительной и других видах промышленности.
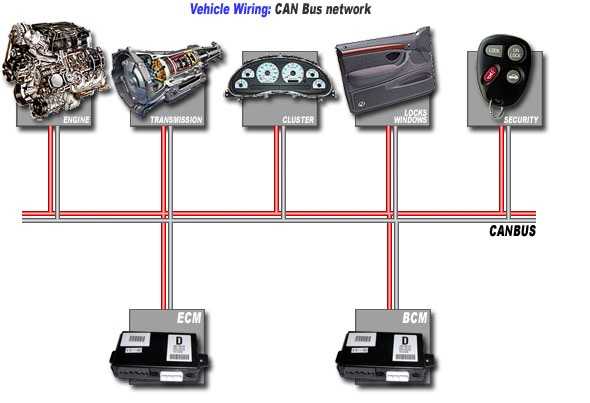
Электронная система связи CAN, которая объединяет все блоки управления машиной в сеть с общим кабелем(шиной) и состоящая из одной пары проводов, называется шиной CAN. Закодированные данные посылаются от блоков управления на шину CAN.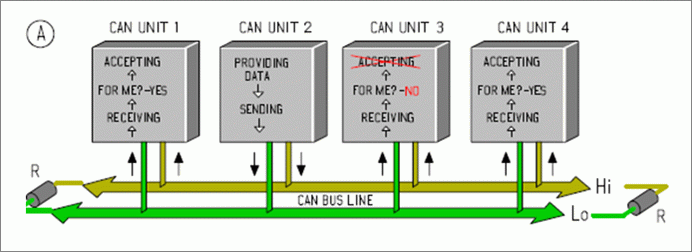
Рисунок — CAN шина из 4-х блоков управления.
Выше показана шина CAN, состоящая из 4-х блоков управления. На концах общего кабеля (шины) устанавливается согласующие сопротивления (терминаторы, резисторы) Обычно сопротивление каждого резистора составляет 120 Ом. Применение согласующих резисторов на концах системы позволяет избежать отражение сигнала в конце линии тем самым обеспечивая нормальную работу всей CAN сети.
Передача сигналов в шине CAN осуществляется посредством двух скрученных между собой проводов (витая пара, Twisted Pair) Применение витой пары проводов, обусловлено дифференциальной передачей данных и высокой защитой такого решения от внешних помех.
В нашем случае блок №2 отправляет один сигнал по двум витым проводам в шину CAN, причем у этого сигнала будет различное напряжение на каждом проводе витой пары. Другие блоки в сети читают сигнал и определяют какому блоку оно предназначено и какую команду нужно выполнить (Блоки №1 и №4)
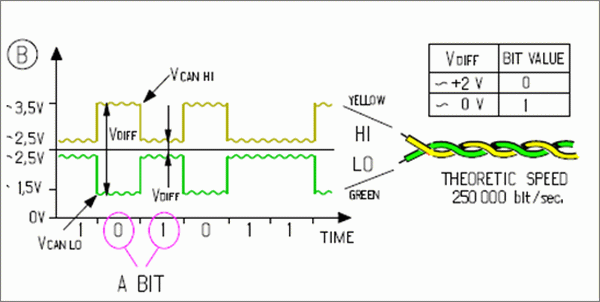 Рисунок — Принцип линии CAN
Рисунок — Принцип линии CAN
Так происходит передача сигналов по шине CAN. Сами эти сигналы представляют собой «кадры» (сообщения), которые принимаются всеми элементами сети CAN. Полезная информация в кадре состоит из идентификационного поля (идентификатора) длиной 11 бит (стандартный формат) или 29 бит (расширенный формат, надмножество предыдущего) и поля данных длиной от 0 до 8 байт. Идентификационное поле говрит о содержимом пакета и служит для определения приоритета при попытке одновременной передачи несколькими сетевыми узлами. Также в кадре (сообщении) помимо полезной информации содержится служебная информация. Она представлена полями проверки, полем отзыва и другим полями. В конце кадра содержится «поле конец сообщения»
В шине CAN сообщения от блоков управления должны передаваться в общую шину , то для исключения конфликтов между блоками, каждый узел перед отправкой кадра проверяет сеть на передачу доминантного бита. Устройство передающее доминантный бит считается приоритетным. Таким образом устройство будет дожидаться освобождения линии CAN. С одной стороны такой алгоритм работы повышает быстродействие, но с другой при неправильной работе одного из блоков управления возможна полная «загрузка» CAN шины и невозможность отправки сообщении другими блоками, элементами сети CAN (Линия для них будет всегда занята).
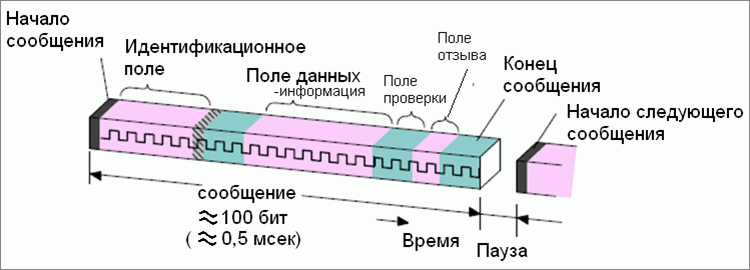
Рисунок —Структура сообщения
Напоследок пример работы:
Переключением кнопки инициируем команду блока управления №1 передачу сообщений в шину CAN. Блок №2 получает сообщение и расшифровав в сообщении что кадр пришел для него с командой включить свет. Подается бортовое напряжение на потребитель.
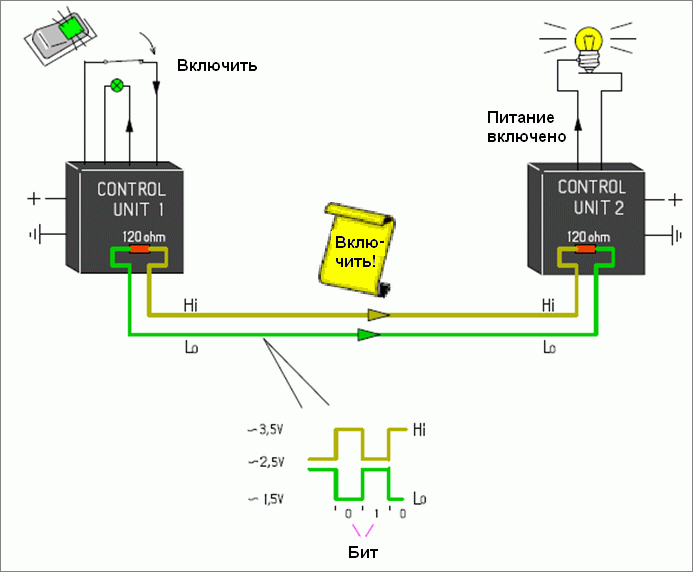 Рисунок — Принцип коммуникации через CAN
Рисунок — Принцип коммуникации через CAN
Вот такой принцип работы шины CAN без конкретных углублений. Также стоит отметить, что шина CAN может иметь свои особенности, зависящее от области применения и фирмы производителя. В статье я рассказал о наиболее часто встречающейся шине CAN, которую можно встретить в современных грузовых и легковых автомобилях, тракторах и разнообразной спец технике.
1″ :pagination=»pagination» :callback=»loadData» :options=»paginationOptions»>
Статья написана по материалам сайтов: www.ugona.net, voditeliauto.ru, catterbet.com.
Причины появления CAN-шины
Когда вы нажимаете выключатель в своем доме, чтобы включить свет, электричество проходит через выключатель к лампам.
Автомобили раньше использовали такое же подключение. С тех пор как в 1915 году Генри Форду пришла идея добавить в свои автомобили фары и электрический сигнал, электричество поступало от аккумулятора через выключатели к фарам и другим устройствам.
К 1960-м годам в каждом автомобиле были тысячи тяжелых проводов.

После нефтяного эмбарго 1970-х годов на автопроизводителей оказывалось все большее давление с целью повышения эффективности использования топлива. Поэтому они начали искать способы уменьшить вес выпускаемых автомобилей.
К началу 1980-х годов в автомобилях было все больше и больше электронных блоков управления. Сначала электронное управление получили самые важные системы, такие как системы управления двигателем, трансмиссией и тормозной системой. Но со временем электронное управление распространилось и на второстепенные либо периферийные системы, такие как климат-контроль, блоки комфорта и прочие.
В скором времени такое положение дел привело к тому, что производители столкнулись тремя проблемами:
Вследствие увеличения числа электронных компонентов очень сильно выросла длина и вес проводки, потому что все эти датчики, исполнительные механизмы и блоки управления необходимо было соединять между собой проводами.
Нередко приходилось дублировать один и тот же датчик, потому что он требовался для работы разных систем.
Сложность диагностирования подобных систем. Ведь компонентов стало целое множество. Схема электропроводки перестала умещаться на десятках страниц и при этом никакой системы самодиагностики еще не было.




Такие компании, как Bosch, искали тип шинной коммуникационной системы, которая могла бы использоваться в качестве системы связи между несколькими ЭБУ и системами автомобиля.
Они искали на рынке, но не могли найти именно то, что было нужно, поэтому они начали разработку «Controller Area Network» в партнерстве с Mercedes-Benz, Intel, а также несколькими университетами Германии.
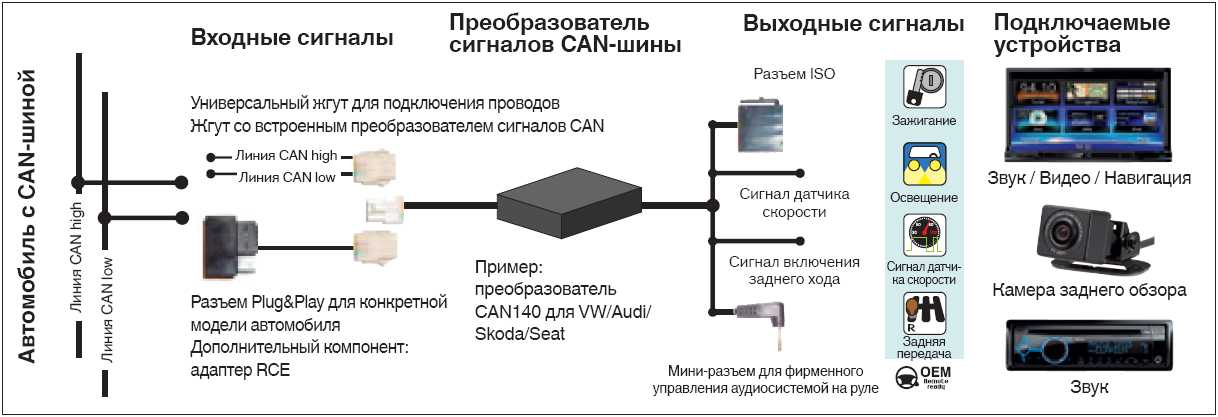
CAN шина, как подключается автосигнализация к цифровой шине
Анализатор цифровой шины справляется не только со внутренними системами и устройствами автомобиля. Подключение внешних элементов –сигнализация, датчики, другие устройства, добавляет цифровому устройству больше нагрузки, но при этом его продуктивность остаётся прежней. Автосигнализация, которая имеет адаптер для подключения к цифровой шине устанавливается по стандартной схеме, а для того, чтобы подключиться к CAN необходимо пройти несколько простых шагов:
- Автосигнализация по стандартной схеме подключается ко всем точкам автомобиля.
- Владелец транспортного средства ищет оранжевый, толстый провод – он ведёт к цифровой шине.
- Адаптер сигнализации подключается к проводу цифровой шины автомобиля.
- Производятся необходимые закрепляющие действия –установка системы в надёжном месте, изоляция проводов, проверка правильности произведённого процесса.
- Настраиваются каналы для работы с системой, задаётся функциональный ряд.
Возможности современной цифровой шины велики, ведь виток из двух проводов объединяет в себе доступ до всех основных и дополнительных систем автомобиля. Это помогает избежать наличия большого количества проводов в салоне и упрощает работу всей системы. Цифровая шина работает по типу компьютера, а это в современном мире очень актуально и удобно.
Полезные советы и выводы
- При выборе CAN модуля следует убедиться, что он совместим с вашим автомобилем и той системой, с которой вы планируете использовать его.
- Хорошо функционирующая CAN-шина — это основа для эффективной работы систем автомобиля.
- Модули управления могут стать причиной неисправностей в работе автомобиля, поэтому при возникновении проблем рекомендуется прибегнуть к услугам квалифицированных специалистов для диагностики и устранения неисправностей.
Как войти в Сдо
Для того чтобы войти в СДО (Систему дистанционного обучения) необходимо перейти на сайт Центра дистанционного обучения, который расположен по адресу http://sdo.academy21.ru. На главной странице сайта находится кнопка «Вход в СДО», которая доступна для пользователей с любых устройств: персонального компьютера или смартфона. Алгоритм действий при входе в СДО одинаков для всех устройств. Необходимо нажать на кнопку «Вход в СДО» и ввести логин и пароль от своей учетной записи. После этого откроется личный кабинет, где можно просматривать свои курсы, задания и коммуницировать с преподавателями и другими студентами. Вход в СДО позволяет осуществить дистанционное обучение и получить необходимые знания и навыки в удобное для студента время и месте.
Чем отличается Кан шина от к линии
К-линия и CAN-шина являются разными типами шин, используемых в автомобильной электронике. К-линия обычно используется для передачи данных от отдельных датчиков и имеет скорость передачи до 10 кбит/с. Это позволяет передавать небольшие объемы данных между компонентами автомобиля.
В свою очередь, CAN-шина имеет гораздо большую скорость передачи данных до 1 Мбит/с, что позволяет передавать большие объемы данных между различными узлами управления автомобиля. Она используется для передачи данных между компьютерами автомобиля и различными узлами, такими как моторное управление, трансмиссия, ABS-система и другие.
Таким образом, К-линия и CAN-шина играют важную роль в передаче данных в автомобильной электронике, но имеют разные характеристики и применение. При выборе шины нужно учитывать скорость передачи данных, объем передаваемых данных и требования к надежности и безопасности.
Что означает 2 CAN 4 Lin
Интерфейс 2CAN+4LIN позволяет расширить возможности настройки цифровых шин автомобиля. При его использовании можно управлять такими функциями, как обход штатного иммобилайзера, автоматический довод стекол, управление предпусковым подогревом двигателя и многими другими параметрами. В современных автомобилях число функций, контролируемых цифровыми средствами, растет с каждым годом. Реализация 2CAN+4LIN интерфейса становится одним из самых востребованных инструментов для конфигурации и программирования электронных устройств автомобиля. Это обеспечивает большую гибкость настроек при использовании нестандартных решений, а также повышенный уровень удобства и комфорта в эксплуатации транспортного средства.
Что значит все включено софт
Софт олл — это вариант «все включено», который не включает алкоголь. Это такая же система, которая предлагает трехразовое питание в основном ресторане. Напитки безалкогольные и кофе можно заказать в барах у бассейна и на пляже с 10:30 утра до захода солнца. Если вы избегаете алкоголя, но хотите отдохнуть и наслаждаться всеми удобствами отеля, то система софт олл может быть отличным выбором. Вам не придется оплачивать напитки и еду каждый раз, когда захочется поесть или попить, так как все уже включено в стоимость проживания. Таким образом, вы можете насладиться своим отдыхом, не беспокоясь о дополнительных расходах на питание и напитки.